11
Mar
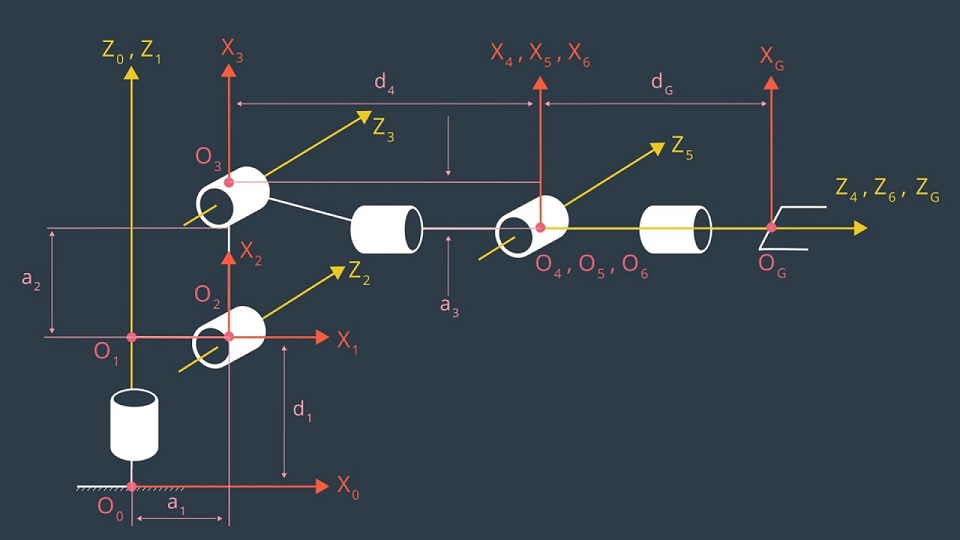
Here is an update on my Arduino Teensy 32 inverse kinematics project. For reducing the complexity we reduce the problem from 3D to 2D point of view.
Inverse kinematics 6 axis robot. The complexity of the inverse kinematics problem for 6-revolute-axix robots is highly dependent on the mechanical structure of the robot. The study of the kinematics of 6-revolute-axis manipulators based on results of previous analyses of 4- and 5-axis manipulators leads to an efficient inverse kinematics method that reduces the problem to solving a system of two nonlinear equations. A forward and inverse kinematic analysis of 6 axis DENSO robot with closed form solution is performed in this paper.
Robotics toolbox provides a great simplicity to us dealing with kinematics of robots with the ready functions on it. However making calculations in traditional way is important to. Here is an update on my Arduino Teensy 32 inverse kinematics project.
The 6 DOF robotic arms servos are controlled by the Teensys PWM pins. The analysis of the MA-2000 educational robot arm kinematics is presented in this paper. The revolute robot consists of six rotary joints 6-DOF with base shoulder elbow wrist pitch wrist yaw.
Inverse Kinematics calculation of 6 dof robotic manipulatorCould someone please suggest what kind of IK calculation method I should follow. The problem of inverse kinematics to a general 6-degrees-of-freedom serial robot was considered hard for a long time. Nevertheless it was solved and the solution in Raghavan and Roth 1993 is a widely acknowledged method and improvements have also been made since see eg Husty Pfurner and Schröcker 2007.
The kinematics equations of the robot are used in robotics computer games and animation. The reverse process that computes the joint parameters that achieve a specified position of the end-effector is known as inverse kinematics. I hope this will help you a lot.
If you still face any issue then check. Die inverse Kinematik Inverskinematik oder Rückwärtstransformation ist ein Begriff aus der Computeranimation und RobotikSie ermöglicht bei einem Roboter die Bestimmung der Gelenkwinkel der Armelemente anhand der Pose Position und Orientierung des EndeffektorsSie spielt damit eine wichtige Rolle bei der Bewegung von Industrierobotern und bei der Computeranimation von Charakteren. 3D printed 6-Axis Robot with inverse kinematics - YouTube.
3D printed 6-Axis Robot with inverse kinematics. If playback doesnt begin. Microb - 3D printed 6-axis desktop robot - inverse kinematics catia - YouTube.
Microb - 3D printed 6-axis desktop robot - inverse kinematics catia. In this project the inverse kinematic equation will use a geometric method to determine the joint angles of the robot arm to reach desired end effector position. For reducing the complexity we reduce the problem from 3D to 2D point of view.
Now lets assume we look at the robot.
Previous post
Inverse time overcurrent relay theoryNext post
Invasive papillary carcinoma bladder